DSP Basics
What is DSP ?
Digital Signal Processor device which takes digital signal and alters them through different algorithms and provides the results within milliseconds. These are normally found in Speakers, Mobiles..
In audio applications, DSP plays a key role to use different features like ANC, adaptive filtering, Noise suppression..
Digital Signal Processing :
X(t) -> Anti aliasing -> Sample & hold -> ADC -> DSP -> DAC -> Reconstructed signal -> Y(t)
Audio Processing - Modification audio within same domain
Sampling - Converting the continuous signal into discrete signal
Importance of Sampling in DSP:
- Digital Representation: Enables analog signals to be represented digitally, which is essential for digital storage, processing, and transmission.
- Discrete Processing: Allows the use of digital algorithms and systems that are more robust and flexible compared to their analog counterparts.
- Accuracy and Efficiency: Facilitates precise and efficient manipulation of signals using digital techniques.
Nyquist Theorem - Samples that can be reconstructed back when sampling at frequency higher than the maximum frequency
Nyquist rate - Rate at which a signal can be re-constructed after sampling
fs >2fmax
Why Nyquist theorem is critical in DSP?
- Preventing the aliasing
- Signal reconstruction
ex: For 10khz signal will have to sampled at greater than 20khz
if sampling rate > nyquist rate -> Signal oversampled
sampling rate < nyquist rate -> Signal undersampled also know as Aliasing
In the below figure freq = 1000, time = 0.01 sec sampling rate = 48000
No of samples present in this signal = Max-frequency * Time * Sampling frequency
= 1000 * 0.01 * 48000
= 480 samples

For one single cycle = Max-frequency * Time * Sampling Rate
= 1000 * 0.001 * 48000
= 48 samples


In audacity, we can't generate a tone more than the half of the sampling frequency as shown below

It will not generate because its not satisfying the nyquist criteria which fs > 2fmax


Even if re-sample we will not get proper sine wave because signal already lost which we can't restore

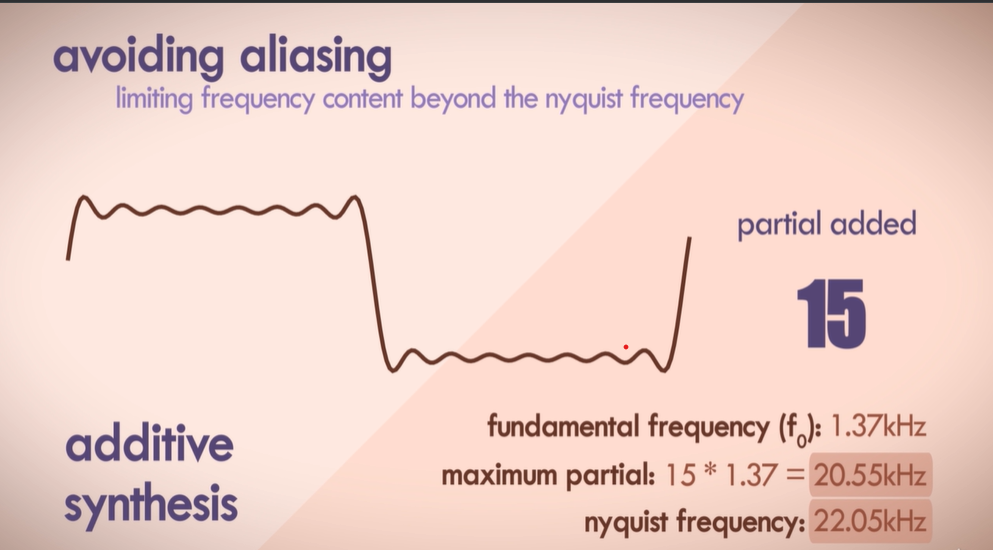
Anti-Aliasing - pre-alias apply low pass filter to attenuate high sampled frequencies

Interpolation & Decimation:
Quantization - Process of converting discrete time domain signal to discrete time discrete amplitude signal
Quantization error - Difference between quantized value & original value
Bit Rate - No.of bits transferred or processed from one point to another point in one second
Bandwidth - Total amount of data transferred or processed from one point to another point in one second
Bandwidth is capacity and bitrate is transfer rate
Multirate signal processing:
Interpolation : Process of increasing the sampling rate of a signal. It involves two steps
- Up sampling is done by inserting the L-1 zeros in the original signal, Where L is interpolation factor
- Filtering is to smooth the signal after interpolation & interpolate the zeros in between original signal
- Filtering is done to remove unwanted high frequencies which may cause aliasing
- Down sampling is performed by taking M th sample and discard the rest of samples, where M is the decimation factor
Digital Filters:
1. IIR Filter - Infinte Impluse Response
2. FIR filter - Finite Impluse Response
IIR Filters:
Pros:
- Requires less coefficients & memory
- It has low latency, so used for any real time applications in RF
Cons:
- It is not stable compared to FIR
- Need more analysis while implementing in fixed point especially using Direct FormII which will overflow
- It has non-linear phase
- Easier to implement
- More stable than IIR filters
- It has linear phase
- It has better performance
- It requires more memory
- It has high latency
Designing of FIR filter : We can design fir filter in two different ways.
1. Filter coefficient's forward & input backwards
2. Filter coefficient's backward & input forward
equation 1:

equation 2:


Here x - input
b - Impulse response
z - delay
C Code:

Fir data flow:
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Index |
insamp |
input
buffer |
Coeffcients |
|
Set
insamp buffer with 0 |
0 |
0 |
0 |
0 |
|
1 |
0 |
1 |
1 |
|
|
2 |
0 |
2 |
2 |
|
|
3 |
0 |
3 |
3 |
|
|
4 |
0 |
4 |
4 |
|
|
5 |
0 |
5 |
5 |
|
|
6 |
0 |
6 |
6 |
|
|
7 |
0 |
7 |
7 |
|
|
8 |
0 |
8 |
8 |
|
|
9 |
0 |
9 |
9 |
|
|
10 |
0 |
10 |
10 |
|
|
11 |
0 |
11 |
11 |
|
|
12 |
0 |
12 |
12 |
|
|
13 |
0 |
13 |
13 |
|
|
14 |
0 |
14 |
14 |
|
|
15 |
0 |
15 |
15 |
|
|
copy
input buffer |
16 |
0 |
|
|
|
17 |
1 |
|
|
|
|
18 |
2 |
|
|
|
|
19 |
3 |
|
|
|
|
20 |
4 |
|
|
|
|
21 |
5 |
|
|
|
|
22 |
6 |
|
|
|
|
23 |
7 |
|
|
|
|
24 |
8 |
|
|
|
|
25 |
9 |
|
|
|
|
26 |
10 |
|
|
|
|
27 |
11 |
|
|
|
|
28 |
12 |
|
|
|
|
29 |
13 |
|
|
|
|
30 |
14 |
|
|
|
|
31 |
15 |
|
|
|
I = 0 |
I = 1 |
I = 2 |
I = 3 |
|||||||||
|
in |
|
coeff |
in |
|
coeff |
in |
|
coeff |
in |
|
coeff |
|
|
0 |
* |
15 |
0 |
* |
in0 |
0 |
* |
in1 |
0 |
* |
in2 |
|
|
1 |
* |
14 |
1 |
* |
15 |
1 |
* |
in0 |
1 |
* |
in1 |
|
|
2 |
* |
13 |
2 |
* |
14 |
2 |
* |
15 |
2 |
* |
in0 |
|
|
3 |
* |
12 |
3 |
* |
13 |
3 |
* |
14 |
3 |
* |
15 |
|
|
4 |
* |
11 |
4 |
* |
12 |
4 |
* |
13 |
4 |
* |
14 |
|
|
5 |
* |
10 |
5 |
* |
11 |
5 |
* |
12 |
5 |
* |
13 |
|
|
6 |
* |
9 |
6 |
* |
10 |
6 |
* |
11 |
6 |
* |
12 |
|
|
7 |
* |
8 |
7 |
* |
9 |
7 |
* |
10 |
7 |
* |
11 |
|
|
8 |
* |
7 |
8 |
* |
8 |
8 |
* |
9 |
8 |
* |
10 |
|
|
9 |
* |
6 |
9 |
* |
7 |
9 |
* |
8 |
9 |
* |
9 |
|
|
10 |
* |
5 |
10 |
* |
6 |
10 |
* |
7 |
10 |
* |
8 |
|
|
11 |
* |
4 |
11 |
* |
5 |
11 |
* |
6 |
11 |
* |
7 |
|
|
12 |
* |
3 |
12 |
* |
4 |
12 |
* |
5 |
12 |
* |
6 |
|
|
13 |
* |
2 |
13 |
* |
3 |
13 |
* |
4 |
13 |
* |
5 |
|
|
14 |
* |
1 |
14 |
* |
2 |
14 |
* |
3 |
14 |
* |
4 |
|
|
15 |
* |
0 |
15 |
* |
1 |
15 |
* |
2 |
15 |
* |
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Introduce one delay for each |
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
||||


Comments
Post a Comment